AFS (Active Front Steering) – это система активного рулевого управления, которая по своей сути является усовершенствованной классической системой рулевого управления. Основное назначение AFS – верное распределение усилия между всеми составляющими рулевой системы, а главная цель – повысить эффективность управления автомобилем на различных скоростях. Водитель же, при наличии в автомобиле активного рулевого управления, получает повышенный комфорт и уверенность в движении. Рассмотрим принцип работы, устройство AFS, а также его отличия от классической системы рулевого управления.
Что такое активное рулевое управление
Система активного рулевого управления по сути это доработанный механизм обычного рулевого управления. Наличие данной системы на борту автомобиля способствует улучшению динамических характеристик, лучшему управлению машиной, а так же улучшает комфорт. Впервые систему AFS (активного рулевого управления) установили в 2003 году на топовые комплектации автомобилей BMW.
Если рассматривать более детально, то активное рулевое управление может менять передаточное число между рулевым колесом и механизмом поворота колес, в зависимости от скорости движения. К тому же система может самостоятельно корректировать угол поворота передних колес в момент входа в поворот или торможения на скользкой дороге. В дополнение ко всему система активного рулевого управления может подруливать задними колесами, тем самым увеличивая маневренность автомобиля.
Corrective Steering
In addition to providing a variable steering ratio, the BMW active steering system is also capable of generating corrective steering actions to enhance vehicle yaw stability. Unlike conventional brake actuated stability control, corrective steering actions occur in a continuous manner and its operation is often not perceived by the driver. Furthermore; the elimination of brake intervention allows yaw stability control without loss of forward speed, thus vehicle performance is improved.
In the event of oversteer; the active steering system creates a countersteering action thus reducing the yaw moment and yaw rate. In extreme oversteer cases active steering works in conjunction with conventional brake actuated stability control for maximum effect. In the event of understeer, further increasing the front wheel slip angle does not generate additional lateral force at the front axle, therefore active steering is not helpful.
The corrective steering function is de-activated (along with the brake actuated stability control system) by pressing a dash mounted switch. This allows the driver full control over the front wheel steer angle and is intended for use in extreme recreational driving (e.g. on track days). The variable steering ratio remains active.
Принцип работы системы
Система активного рулевого управления активируется при запуске двигателя. Работа системы заключается в изменении передаточного отношения рулевого механизма в зависимости от скорости и условий движения.
При совершении маневров на низкой скорости в соответствии с сигналом датчика угла поворота рулевого колеса включается электродвигатель. Электродвигатель через червячную пару передает вращение на эпициклическую шестерню планетарного редуктора. Вращение шестерни в определенном направлении с максимальной скоростью обеспечивает наименьшее передаточное отношение рулевого механизма, которое достигает значения 1:10. При этом руль становиться острым, уменьшается число оборотов рулевого колеса от упора до упора, чем достигается высокий комфорт в управлении.
С ростом скорости движения выполнение поворотов сопровождается уменьшением частоты вращения электродвигателя, соответственно увеличивается передаточное отношение рулевого механизма. На скорости 180-200 км/ч передаточное отношение достигает оптимального значения 1:18. Электродвигатель при этом перестает вращаться, а усилие от рулевого колеса передается на рулевой механизм напрямую.
С дальнейшим ростом скорости электродвигатель снова включается, при этом вращение производится в противоположную сторону. Передаточное отношение рулевого механизма может достигать величины 1:20. При данном передаточном отношении рулевое управление обладает наименьшей остротой, увеличивается число оборотов рулевого колеса от упора до упора, тем самым обеспечивается безопасность маневрирования на высоких скоростях.
Если при прохождении поворота фиксируется избыточная поворачиваемость автомобиля (потеря сцепления задних колес с дорогой) система AFS на основании сигналов датчиков системы DSC самостоятельно корректирует угол поворота передних колес. В результате чего сохраняется курсовая устойчивость автомобиля. В случае, когда система активного рулевого управления не может полностью обеспечить устойчивость автомобиля, подключается система динамической стабилизации.
Аналогичным образом система активного рулевого управления стабилизирует движение автомобиля при торможении на скользком покрытии, чем достигается повышение эффективности антиблокировочной системы тормозов ABS и сокращение тормозного пути.
Система активного рулевого управления постоянно включена и не имеет возможности отключения.
References
- Koehn, P., Eckrich, M., 2004. Active Steering – The BMW Approach Towards Modern Steering Technology. SAE World Congress and Exhibition, 08/03/2004 – 11/03/2004. Detroit, Michigan, USA.
- Koehn, P., Eckrich, M., 2004. Active Steering – The BMW Approach Towards Modern Steering Technology. SAE World Congress and Exhibition, 08/03/2004 – 11/03/2004. Detroit, Michigan, USA.
- Koehn, P., Eckrich, M., 2004. Active Steering – The BMW Approach Towards Modern Steering Technology. SAE World Congress and Exhibition, 08/03/2004 – 11/03/2004. Detroit, Michigan, USA.
- Koehn, P., Eckrich, M., 2004. Active Steering – The BMW Approach Towards Modern Steering Technology. SAE World Congress and Exhibition, 08/03/2004 – 11/03/2004. Detroit, Michigan, USA.
- Koehn, P., Eckrich, M., 2004. Active Steering – The BMW Approach Towards Modern Steering Technology. SAE World Congress and Exhibition, 08/03/2004 – 11/03/2004. Detroit, Michigan, USA.
- Koehn, P., Eckrich, M., 2004. Active Steering – The BMW Approach Towards Modern Steering Technology. SAE World Congress and Exhibition, 08/03/2004 – 11/03/2004. Detroit, Michigan, USA.
Устройство активного рулевого управления
Устройство системы активного рулевого управления не самое простое и одновременно объединяет в себе несколько других систем безопасности. Все же специалисты выделяют основные детали, которые отвечают за поворот колес и стабилизацию, остальные механизмы считаются вспомогательными, в том числе и подруливание задних колес. Среди основных механизмов можно назвать рулевую рейку, датчики, блок управления, непосредственно сам руль и рулевые тяги. Теперь же рассмотрим подробней, какую функцию выполняет каждая из деталей.
Весь процесс срабатывания механизма активного рулевого управления начинается с входных датчиков. Независимо от модели автомобиля они предназначены для снятия разных параметров. Например, датчики угла поворота руля, положение электродвигателя, датчики суммарного угла поворота, а так же датчики динамической стабилизации автомобиля. Хотя, последнее время перестают использовать датчик суммарного поворота, снимая информацию с других датчиков автомобиля.
Получив необходимую информацию с датчиков, она поступает в электронный блок управления (ЭБУ). Можно сказать, что это сердце всей системы и благодаря ему, ведется управление всеми механизмами активного рулевого управления. Задача ЭБУ не сложная, принять сигналы, обработать и передать на исполнительные устройства. Больше всего электронный блок активного рулевого колеса взаимодействует с электроусилителем руля, системой управления двигателем и системой динамической стабилизации автомобиля.
После обработки информации сигналы подаются на рулевую рейку, точней электродвигатель рулевой рейки. За счет чего система может самостоятельно решать насколько повернуть рейку в ту или иную сторону. Сам же электродвигатель вращает коронную шестеренку, в результате чего меняется передаточное отношение механизмов. Что касается рулевого колеса и рулевых тяг, то они выполняют те же функции, что и в обычном управлении автомобилем.
Steer-By-WireEdit
The aim of steer-by-wire technology is to completely do away with as many mechanical components (steering shaft, column, gear reduction mechanism, etc.) as possible. Completely replacing conventional steering system with steer-by-wire holds several advantages, such as:
- The absence of steering column simplifies the car interior design.
- The absence of steering shaft, column and gear reduction mechanism allows much better space utilization in the engine compartment.
- The steering mechanism can be designed and installed as a modular unit.
- Without mechanical connection between the steering wheel and the road wheel, it is less likely that the impact of a frontal crash will force the steering wheel to intrude into the driver’s survival space.
- Steering system characteristics can easily and infinitely be adjusted to optimize the steering response and feel.
Схема активного рулевого управления автомобиля
Учитывая непростую конструкцию механизма активного рулевого управления, а так же поняв, за что отвечают определенные детали, следует рассмотреть смеху механизма.
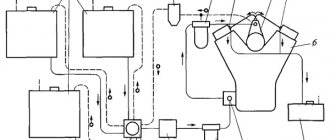
На фото представлена схема активного рулевого управления автомобиля
- датчик угла поворота руля;
- вал рулевого колеса;
- шестерня вала;
- датчик момента на рулевом колесе;
- электронный блок управления;
- электродвигатель;
- зубчатая рейка;
- шестерня усилителя.
Можно сказать, что это основные детали системы активного рулевого управления. Помимо перечисленных элементов, так же к механизму относят бачек для рабочей жидкости, аварийный фиксатор, соединительные шланги, редуктор и клапан системы.
ГУР или ЭУР: преимущества и недостатки усилителей рулевого управления
Конструкция системы AFS объединяет планетарный редуктор и систему управления.
Планетарный редуктор служит для изменения скорости вращения рулевого вала. Он устанавливается на рулевом валу. Планетарный редуктор включает солнечную шестерню, блок сателлитов и коронную (эпициклическую) шестерню. На входе рулевой вал соединен с солнечной шестерней, на выходе – с блоком сателлитов.
Эпициклическая шестерня имеет возможность вращения. При неподвижной шестерне передаточное число планетарного редуктора равно единице и рулевой вал передает вращение напрямую. Вращение эпициклической шестерни в одну или другую сторону позволяет увеличить или уменьшить передаточное число планетарной передачи, чем достигается изменение передаточного отношения рулевого механизма. Вращение шестерни обеспечивает электродвигатель, соединенный с ее внешней стороной посредством червячной передачи.
Для реализации функций системы активного рулевого управления создана система управления. Электронная система управления включает входные датчики, электронный блок управления и исполнительные устройства.
Входные датчики предназначены для измерения параметров работы системы и преобразования их в электрические сигналы. Система AFS в своей работе использует датчики положения электродвигателя, суммарного угла поворота, угла поворота рулевого колеса, датчики системы динамической стабилизации (скорости вращения автомобиля вокруг вертикальной оси и вертикального ускорения). Датчик суммарного угла поворота рулевого механизма может не устанавливаться, в этом случае угол рассчитывается виртуально на основании сигналов других датчиков.
Электронный блок управления принимает сигналы от датчиков, обрабатывает их и в соответствии с заложенным алгоритмом формирует управляющие воздействия на исполнительные устройства. Электронный блок управления имеет соединение и осуществляет взаимодействие с другими системами автомобиля: Servotronic, динамической стабилизации DSC, управления двигателем, доступа в автомобиль.
В роли исполнительного механизма системы AFS выступает электродвигатель. Он обеспечивает вращение эпициклической шестерни планетарного редуктора. Электродвигатель оборудован аварийным электромагнитным фиксатором, блокирующим червячную передачу. В исходном положении передача заблокирована. При подаче тока на электродвигатель, срабатывает электромагнит, и фиксатор, преодолевая усилие пружины, освобождает ротор электродвигателя. При возникновении неисправности в системе AFS, прекращается подача тока на электродвигатель, фиксатор блокирует червячную передачу.
Возникновение неисправностей в системе сопровождается срабатыванием сигнальной лампы на панели приборов. При этом на информационном дисплее появляется сообщение системы самодиагностики.
Integrated Chassis Management (ICM) control unit
Another task of the ICM control unit is to provide the systems in the entire vehicle with the dynamic handling characteristics in the form of signals.
Sensors that used to be installed separately in the DSC sensor are now fitted in the ICM control unit. The ICM control unit uses these sensors to calculate variables that are important for the dynamic handling characteristics of the vehicle at that time:
- Longitudinal acceleration and vehicle inclination in longitudinal direction
- Lateral acceleration and vehicle inclination in transverse direction
- Yaw rate
The ICM control unit is available as a basic version and a high version. The high version features a redundant sensor system for lateral acceleration and yaw rate (safety requirements for active steering).
The steering angle sensor also transmits its signal via a Private-CAN to the ICM control unit.
| Item | Explanation | Item | Explanation |
| 1 | Integrated chassis management (ICM) | 2 | Plug connection (54‐pin) |
Стоимость ремонта и деталей для AFS
На сегодня систему AFS можно встретить не только на автомобилях марки BMW. Большую часть премиальных машин укомплектовывают данным механизмом или же предлагают в качестве опции. Например, на авто марки Lexus систему активного рулевого управления можно встретить чаще всего.
Как показывает практика и отзывы владельцев автомобилей, чаще всего выходят из строя датчики положения кузова автомобиля. Немудрено, так как дороги оставляют желать лучшего и частая качка кузова попросту неизбежна. В среднем стоимость замены датчика составляет порядка 150-175 долларов за 1 шт. В зависимости от модели авто, их как минимум 4 штуки и чаще выходят из строя попарно. Сам же датчик обойдется около $100-120, получается 50% от стоимости это сам ремонт. Электронный блок управления AFS обойдется порядка 10000 рублей. Дороже всего обойдется ремонт рулевой рейки, в среднем около $1000.
Некоторые владельцы автомобилей умудряются самостоятельно заменить датчики. Можно сказать, это самое простое в данном механизме и не требует особых навыков или инструмента. К тому же есть немало советов и похож ситуаций, которые описаны в деталях.
Система активного рулевого управления, хоть и сложный механизм, но без него современные автомобили были бы не столь комфортными, а безопасность была бы на порядок ниже. Если же есть возможность заказать AFS систему в качестве опции, доплатив за нее, то это не будет лишним, а разница в управлении будет ощутима с первых километров.
Planetary gearbox with overriding function with servomotor and servomotor lock
The overriding gear of the active steering is located on the steering box. The planetary gearbox with override function is installed in the split steering shaft. The overriding gear is a planetary gear train with 2 inputs and one output. The first input is formed by the bottom steering shaft of the steering column. The second input shaft is a worm gear on the planetary gear train. The servomotor (actuated by the AL control unit) drives the worm gear of the planetary gear train. The gear ratio from the worm to the worm wheel is 20.5:1. For possible failures, the worm gear is designed as self-inhibiting. The worm gear pair overrides the steering angle of the direct drive-through from the steering shaft. The total steering angle at the steering pinion comprises:
- Steering angle, applied at the steering wheel
- Steering angle applied by the electric servomotor
| Item | Explanation | Item | Explanation |
| 1 | Servomotor, active steering | 2 | two‐pin plug connection |
| 3 | Servotronic valve (connected at the Servotronic control unit) | 4 | Electric servomotor lock |
| 5 | two‐pin plug connection | 6 | three‐pin plug connection |
| 7 | Rotor position sensor | 8 | 4‐pin plug connection |
The electric servomotor on the planetary gearbox with override function receives its voltage supply from three phases (= wires) (U, V, W). In the event of a short circuit, the electric servomotor can turn a maximum of 120°. This prevents inadvertent start-up movements of the servomotor in the event of a short circuit. A temperature sensor in the control unit for active steering (AL) monitors the output stage for the servomotor.
The electric servomotor lock blocks the electric servomotor:
- in the event of faults to prevent it from rotating due to external forces
- when the vehicle is at a standstill and the engine is switched off (not when the vehicle is at a standstill and the engine is running)
If the engine is switched off by the automatic engine start-stop function, the electric servomotor lock remains applied.
Активное рулевое управление автомобиля: в чём фишка марки BMW?
Но, с другой стороны, мало кто знает, что на сегодня существует несколько видов усилителей, каждый из которых обладает своими особенностями.
Для чего вообще усилитель руля? Его задача – не только снижение энергозатрат водителя при повороте рулевого колеса. Данная система делает автомобиль более маневренным, удары колес о неровности дороги не так передаются к рукам водителя, да и, в случае прокола шины, становится проще удерживать машину на дороге.
Так, на сегодня существует три основных вида усилителя руля – электрический, электрогидравлический и гидравлический. На первых автомобилях была «гидравлика», и она не потеряла актуальности до сегодняшнего дня. Со временем, появился электрогидравлический усилитель руля, и сравнительно недавно – электрический.
Какой же из них надежнее? Чему лучше отдать предпочтение? Давайте рассмотрим каждый вид подробнее.
Smart Connect на роутере TP-Link
В компании TP-Link решили придумать свое название для Band Steering — Smart Connect. Что сути дела, по большому счету, не меняет. Точно также роутер автоматически выбирает, к какой из сетей — 2.4 или 5 ГГц — конкретному клиенту будет оптимально подключиться в данный момент времени. Находится эта настройка в разделе «Беспроводной режим»
А вот что положительно отличает функцию Smart Connect на TP-Link от реализации Band Steering в Keenetic, так это то, что здесь не надо сначала прописывать одинаковые параметры для каждой из сетей, и только потом включать режим. На ТП-Линке все задается автоматически после активации галочки «Smart Connect».
Гидроусилитель руля
Гидроусилитель руля состоит из нескольких частей – насоса, масла, гидроцилиндра, соединительных трубок и распределителя. Основным элементом системы является гидроцилиндр, который активируется с помощью насоса. При этом в гидравлической системе создается необходимое давление масла, которое оказывает свое действие на поршень рулевой рейки и делает вращение руля более легким.
Стоит отметить, что постоянная работа гидроцилиндра приводит к увеличению расхода топлива автомобиля. Наиболее слабым звеном во всей системе являются гидравлические трубки, которые часто повреждаются.
Преимущества гидроусилителя руля:
- Действие гидроусилителя приводит к снижению передаточного отношения рулевого механизма, а также к более легкому совершению маневров;
- Снижается сила ударов, передающихся через рулевое колесо к рукам водителя;
- В непредвиденных обстоятельствах становится намного проще удерживать рулевое колесо. Руль не вырывается из рук, и управляемость остается на высоком уровне;
- Даже при выходе из строя гидроусилителя, можно быть уверенным в безопасности вождения;
- Процесс управления является более информативным и точным.
Из недостатков можно выделить только один – повышенный расход топлива.
Что такое технология Band Steering и Smart Connect на роутере?
Режим работы «Band Steering», он же «Smart Connect», обязан своему рождению появлению двухдиапазонных роутеров, которые поддерживают как 2.4, так и 5 ГГц. Основные преимущества последнего, это более высокая скорость и меньшая загруженность каналов wifi. Поэтому тем устройствам, которые также умеют подключаться к обоим этим диапазонам, предпочтительнее выбирать именно 5 GHz.
Теперь представим ситуацию. Есть wifi роутер, который раздает сигнал с одним и тем же именем (SSID), но одновременно на разных частотах. Такая возможность сегодня уже часто встречается в современных маршрутизаторах. И это удобно, поскольку так элементарно проще настроить сеть. Нет смысла создавать две разных, если можно сделать одну, но в разных диапазонах.
Так вот, в этом случае ваш ноутбук или смартфон сам хаотично будет выбирать, к какому именно ему подключиться — 2.4G или 5G. Нагрузка на роутер при этом распределяется неравномерно. На одной частоте может сидеть 5 клиентов, а на другой — 1. Хотя все они поддерживают оба диапазона.
Механизмы Band Steering и Smart Connect как раз призваны упорядочить это явление и распределить нагрузку равномерно. При этом он анализирует возможности и удаленность каждого из подключающихся устройств. И выбирает ту сеть, которая в данный момент для него наиболее предпочтительна.
Например, находясь рядом с источником wifi, лучше подключиться к 5 GHz. При удалении и потери качества сигнала, маршрутизатор фиксирует это и автоматически переподключает ваш гаджет к 2.4 GHz. Так как он более устойчив к преодолению препятствий в виде стен и дверей. А также имеет большую дальность распространения беспроводного сигнала. При этом никаких задержек вы даже не заметите.
Но также для принудительного освобождения диапазона 2.4 ГГц, Band Steering на роутере можно настроить таким образом, чтобы он всех клиентов с поддержкой 5 ГГц переключал именно на него.
Электрический усилитель руля
Данная система состоит из электродвигателя, механической передачи и системы управления. Особенность устройства – создание дополнительного усилия во время поворота руля, с помощью специального электрического привода. Во многих современных авто установлен именно такой усилитель.
Принцип действия основан на работе целого ряда датчиков, которые следят за положением руля и усилием, которое прилагает водитель транспортного средства. При получении определенного сигнала от системы, датчик передает его в блок управления, где происходит обработка сигнала и его передача к электромотору, помещенному в рейку рулевого колеса.
Особенность электрического усилителя руля заключается в том, что он обеспечивает идеальную управляемость автомобиля при движении на любых скоростях, резком возвращении колес в среднем положении или их удержании на этом месте.
Преимущества электрического усилителя:
заключаются в компактности, экономии топлива, простоте настройки и возможности регулирования, минимальном энергопотреблении, а также отсутствии гидравлических магистралей.
Из недостатков можно выделить:
вероятный отказ или отключение системы при возникновении внештатных ситуаций. Подобные неполадки вполне вероятны, в случае серьезных сбоев в работе блоков управления, плохом контактном соединении или при снижении напряжения в бортовой сети машины. В случае, если происходит сбой, на приборной панели должна загореться соответствующая лампа об имеющейся неисправности.
Конструкция ЭУР
ЭУР для компактных автомобилей ЭУР на рулевой колонке
На легких автомобилях большое усилие от ЭУР не требуется, поэтому и электродвигатель, и сервопривод получаются настолько компактными, что легко умещаются под рулем в салоне автомобиля. Заодно там же размещаются и датчики. Таким образом, вся конструкция надежно защищена от пыли, грязи и высоких температур подкапотного пространства, что благоприятно сказывается на надежности.
ЭУР для автомобилей среднего класса Привод ЭУР с двумя шестернями
На среднеразмерных автомобилях устанавливается ЭУР с двумя шестернями. Через одну шестерню на рейку передается усилие от руля, а через другую – вспомогательное усилие от электромотора.
Чтобы создать большое дополнительное усилие применяется ЭУР параллельноосевой конструкции. Для преобразования вращательного движения электродвигателя в линейное перемещение рулевой рейки используется зубчатоременной привод и механизм “винт – гайка на циркулирующих шариках”. Гайка, вращаемая зубчатым ремнем, через шарики перемещает ось рейки. Шарики циркулируют по резьбе, возвращаясь через специальный канал в гайке.
ЭУР для внедорожников и минивенов Устройство параллельно осевого привода
При любом конструктивном исполнении в случае поломки водитель может продолжать безопасно управлять транспортным средством благодаря наличию механической связи между рулем и управляемыми колесами.
- повысить комфорт;
- облегчить процесс управления автомобилем;
- улучшить общую безопасность при езде.